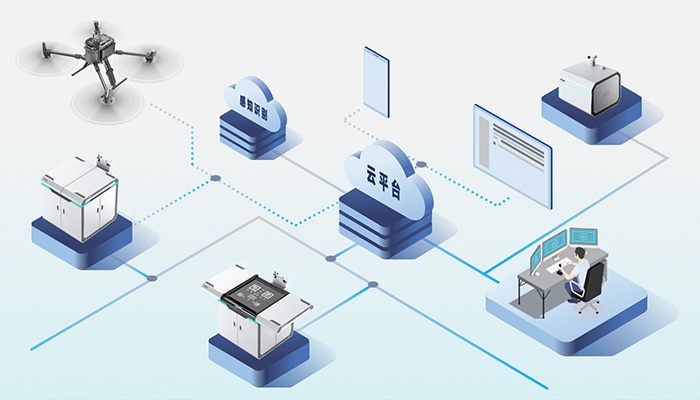
自動飛行系統(tǒng)
軟件平臺

無人機AI識別算法提供了多種高效、精確的方法來識別和分析無人機采集的視覺數(shù)據(jù)。這些算法的多樣性和復(fù)雜性使得無人機能夠在各種環(huán)境和情境下執(zhí)行復(fù)雜的任務(wù),從簡單的圖像分類到復(fù)雜的行為識別。以下是一些主要的無人機AI識別算法類別及其應(yīng)用:
圖像分類算法
圖像分類算法通過分析圖像中的特征來識別和分類目標。卷積神經(jīng)網(wǎng)絡(luò)(CNN)及其變種如ResNet和VGG是在這一類別中最常見的技術(shù)。這些算法能夠有效地處理和分類來自無人機的圖像數(shù)據(jù),應(yīng)用于地物分類、植被監(jiān)測等領(lǐng)域。
目標檢測算法
目標檢測算法不僅識別圖像中的對象,還精確地定位這些對象。Faster R-CNN、YOLO(You Only Look Once)和SSD(Single Shot MultiBox Detector)是目標檢測領(lǐng)域中的領(lǐng)先技術(shù)。無人機使用這些算法進行搜索與救援、安全監(jiān)控等任務(wù),提供實時的目標位置信息。

語義分割算法
語義分割算法通過將圖像中的每個像素分類到不同的類別來實現(xiàn)對圖像的深入理解。FCN(Fully Convolutional Networks)和U-Net廣泛應(yīng)用于精確的地表覆蓋分析、環(huán)境監(jiān)測等領(lǐng)域,為無人機提供像素級的圖像分析能力。
實例分割算法
實例分割算法進一步發(fā)展了語義分割的功能,不僅分類圖像中的像素,還能區(qū)分同一類別中的不同實例。Mask R-CNN和Panoptic FPN是該領(lǐng)域的主要技術(shù),用于詳細的場景理解和特定對象的監(jiān)測,如在農(nóng)業(yè)領(lǐng)域區(qū)分不同植株,進行病害監(jiān)測。
行為識別算法
行為識別算法旨在識別并理解目標的動作或行為模式,這對于安全監(jiān)控和行為分析尤為重要。這類算法結(jié)合時空特征和深度學(xué)習(xí)技術(shù),能夠識別人或車輛的行為,如行走、停止等。
復(fù)亞智能無人機AI識別算法
復(fù)亞智能的無人機AI識別算法結(jié)合上述多種技術(shù),提供定制化解決方案以滿足不同行業(yè)的需求。復(fù)亞智能不斷創(chuàng)新其算法,確保高效性和適應(yīng)性,使其在各種操作環(huán)境中都能表現(xiàn)出色。無論是精確的農(nóng)業(yè)監(jiān)測、高效的城市管理還是實時的安全監(jiān)控,復(fù)亞智能的技術(shù)都能提供強大的支持。無人機AI識別算法不僅極大地擴展了無人機的應(yīng)用范圍,還為未來智能化的發(fā)展打開了新的可能。隨著技術(shù)的不斷進步,復(fù)亞智能將繼續(xù)領(lǐng)航無人機技術(shù)的創(chuàng)新,為低空經(jīng)濟場景提供更智能、更可靠的解決方案。


免費預(yù)約演示
 全自動飛行任務(wù)選擇與執(zhí)行
自動機場的操控與監(jiān)控
自動飛行任務(wù)下的數(shù)據(jù)采集
無人機自動回庫后進行充電或換電
自動巡查任務(wù)的回放,圖像數(shù)據(jù)的查閱
全自動飛行任務(wù)選擇與執(zhí)行
自動機場的操控與監(jiān)控
自動飛行任務(wù)下的數(shù)據(jù)采集
無人機自動回庫后進行充電或換電
自動巡查任務(wù)的回放,圖像數(shù)據(jù)的查閱
添加官方客服

我們的工作時間是工作日9:00~17:30
期待與您溝通并提供您所需的支持或方案,謝謝!
 行業(yè)方案與產(chǎn)品報價
相關(guān)場景案例資料
復(fù)亞自動飛行系統(tǒng)功能
靈活的商務(wù)合作模式
行業(yè)方案與產(chǎn)品報價
相關(guān)場景案例資料
復(fù)亞自動飛行系統(tǒng)功能
靈活的商務(wù)合作模式
行業(yè)方案與產(chǎn)品報價
相關(guān)場景案例資料
復(fù)亞自動飛行系統(tǒng)功能
靈活的商務(wù)合作模式
行業(yè)方案與產(chǎn)品報價
相關(guān)場景案例資料
復(fù)亞自動飛行系統(tǒng)功能
靈活的商務(wù)合作模式

復(fù)亞智能是業(yè)內(nèi)領(lǐng)先的無人機全自動飛行系統(tǒng)研發(fā)和服務(wù)商,用高度智能的自動飛行系統(tǒng)滿足政企用戶低空巡查業(yè)務(wù)需求,分布式部署的無人機機場,讓巡邏干預(yù)隨時可達,巡檢數(shù)據(jù)觸手可及。
投資郵箱:invest@foiadrone.com
媒體合作:BD@foiadrone.com
微信客服
周一至周五:9:00-17:30

掃碼關(guān)注